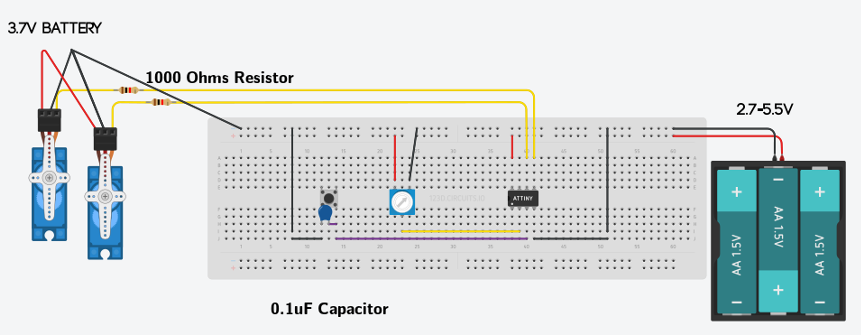
Control to servos with AVR Attiny85 microcontroller.
Back
Attiny85 Servos with C
Posted: 10-14-2017
Language: C
// Attiny85 AVR Microcontroller
// C program for controlling 2 servos using a potentiometer and button.
// Author: Trigat
// I'm new to Attiny85 registers so this code will not be perfect
// and may need some tweaking.
// Put potentiometer on a pin such as PB3
// Put push button on a pin such as PB4
// Put servo on PB0 for OCR0A
// Put servo on PB1 for OCR0B
#define F_CPU 1000000UL // for 1Mhz Attiny85
#include <avr/io.h>
#include <util/delay.h>
#include <avr/interrupt.h>
#include <inttypes.h>
// Predefined Servo position values for OCR0A
// You need to fine tune this for different servos.
// Servo 1
#define SERVO1_ONE 8 // servo position
#define SERVO1_TWO 12
#define SERVO1_THREE 16
#define SERVO1_FOUR 19
#define SERVO1_FIVE 23
#define SERVO1_SIX 28
#define SERVO1_SEVEN 31
// Servo 2
#define SERVO2_ONE 15 // servo position
#define SERVO2_TWO 18
#define SERVO2_THREE 20
#define SERVO2_FOUR 22
#define SERVO2_FIVE 24
#define SERVO2_SIX 27
#define SERVO2_SEVEN 30
// used for button
uint8_t position = 1;
int main(void)
{
// set potentiometer as input, other pins as output
DDRB = 0b00111; // Example: 0b10111 would be pin 3. 0b11011 would be pin 2.
// Enable internal pull-up resistor on PB3(potentiometer) and PB4
// and set others low
PORTB = 0b11000; // PB3 and PB4 set high
// Mode 3 - Fast PWM
TCCR0A |= (1<<WGM01) | (1<<WGM00);
// Set OC0A/OC0B at BOTTOM (non-inverting mode)
// Clear OC0A/OC0B on Compare Match
// *** This may need to be adjusted ****
TCCR0A |= (1<<COM0A1)|(1<<COM0B1); // (1<<COM0B1) controlls pin1
// (1<<COM0A1) controlls pin0
// Set prescaler to 64
// 1 MHz / 64*256 = 61 Hz PWM frequency
TCCR0B |= (1<<CS01) | (1<<CS00);
// Start with the servo in center position
OCR0A = SERVO1_THREE;
OCR0B = SERVO2_FOUR;
unsigned int adc_value; // Variable to hold ADC result
ADCSRA = (1 << ADEN) | (1 << ADPS2) | (1 << ADPS0);
// ADEN turns on ADC
// ADPS2 and ADPS0 set to make division factor 32
ADMUX = PINB3; // ADC input channel set to Pin3 (potentiometer pin)
while (1)
{
// For potentiometer (servo 1)
ADCSRA |= (1 << ADSC); // Start conversion
while (ADCSRA & (1 << ADSC)); // Wait for conversion to complete
adc_value = ADCW; // Store ADC value
if (adc_value > 880 && adc_value < 1023)
{
OCR0A = SERVO1_ONE;
}
else if (adc_value > 680 && adc_value < 880)
{
OCR0A = SERVO1_TWO;
}
else if (adc_value > 570 && adc_value < 680)
{
OCR0A = SERVO1_THREE;
}
else if (adc_value > 450 && adc_value < 570)
{
OCR0A = SERVO1_FOUR;
}
else if (adc_value > 310 && adc_value < 450)
{
OCR0A = SERVO1_FIVE;
}
else if (adc_value > 200 && adc_value < 310)
{
OCR0A = SERVO1_SIX;
}
else if (adc_value < 100)
{
OCR0A = SERVO1_SEVEN;
}
// For button press (servo 2)
if (bit_is_clear(PINB, 4))
{
switch(position)
{
// delay makes servo run smoother
case 0:
OCR0B = SERVO2_ONE;
_delay_ms(600);
break;
case 1:
OCR0B = SERVO2_TWO;
_delay_ms(600);
break;
case 2:
OCR0B = SERVO2_THREE;
_delay_ms(600);
break;
case 3:
OCR0B = SERVO2_FOUR;
_delay_ms(600);
break;
case 4:
OCR0B = SERVO2_FIVE;
_delay_ms(600);
break;
case 5:
OCR0B = SERVO2_SIX;
_delay_ms(600);
break;
case 6:
OCR0B = SERVO2_SEVEN;
_delay_ms(600);
break;
default:
break;
}
}
position++;
if(position == 7)
position = 0;
}
}